橋とその先: AI と AR が海事の意思決定に革命を起こす

古野のシステムは、ブイ、ボート、船舶などの AIS ターゲットにグラフィカルな仮想形状を重ねて、視界不良の状況でもそれらの位置の詳細を表示できます。画像提供:古野

「近い将来に最も起こりそうなシナリオの 1 つは、船舶の乗組員が機械学習と陸上施設からの船舶状況の視覚化の両方によって強化されることです。」 Furuno USA Inc. の全国販売マネージャー、マット・ウッド氏
-とスクリーンベースの-インターフェース-(右側)-Jon-155462 "ヘッドマウント AR インターフェース (左側) とスクリーンベースの AR インターフェース (右側) のレンダリング。レンダリングは Jon Fauske によるもので、著作権は Oslo School of Architecture and design が所有しています。画像提供: Kjetil Nordby")
ヘッドマウント AR インターフェース (左側) とスクリーンベースの AR インターフェース (右側) のレンダリング。レンダリングは Jon Fauske によるもので、著作権は Oslo School of Architecture and design が所有しています。画像提供: Kjetil Nordby

船が港に入港する際に AR オーバーレイがどのように変化するかをレンダリングします。レンダリングは Jon Fauske、著作権は Oslo School of Architecture and design です。画像提供:Kjetil Nordby

Shipin Systems は、船舶全体の主要な運用エリアに設置された AI ベースのカメラ システムを使用しています。画像提供: ShipIn Systems Inc.
すでにブリッジ上でスマートな意思決定サポートを実現しています。古野電気の技術により、船舶の前方からのライブビデオ画像に、船首方位、AIS データ、レーダーターゲット追跡、物体識別、航路ウェイポイント、海図情報などのナビゲーション情報が重ねて表示されます。
SEA.AI のブリッジ サポート システムは、AIS を搭載していない大型船舶を最大 7.5 キロメートル (約 5 マイル) の範囲で識別でき、小型船舶を最大 3 キロメートル (約 2 マイル) 離れた場所まで、漂流物を最大 700 メートル (約 0.5 マイル) 離れた場所まで識別できます。
監視員の状況認識をテクノロジーで強化すると、疲労を軽減し、より早く、より適切な判断を下せるようになります。しかし、経験豊富な監視員のスキルを強化するのは簡単ではありません。情報のデジタル解釈をサポートする知識ベースの構築には、多大な労力がかかります。
SEA.AI が受ける最も一般的な問い合わせの 1 つは、半水没したコンテナを検出するシステムの機能に関するものです。浮いているコンテナの検出は、ブイに比べてサイズが大きく、長方形の堅固な構造で、コンテナと周囲の水の温度差があるため、ほとんど簡単です。ただし、視野角、距離、海況、水没レベル、水中の向き、時刻、気象条件、日光の強さ、空間の向きと傾斜など、さまざまな変数によって、物体は大きく変化する可能性があります。その結果、SEA.AI が物体を確実に識別するには、数十万枚の画像からの入力が必要になることがよくあります。
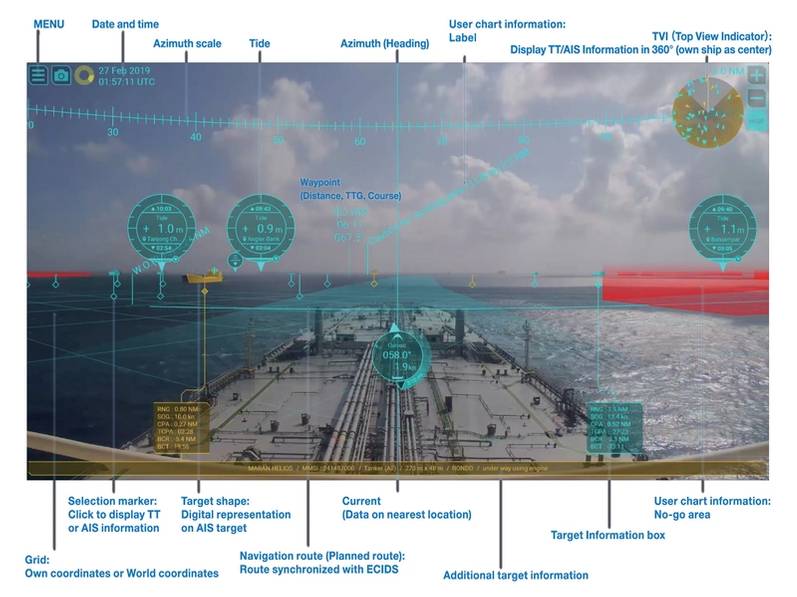 古野のシステムは、ブイ、ボート、船舶などの AIS ターゲットにグラフィカルな仮想形状を重ねて、視界不良の状況でもそれらの位置の詳細を表示できます。画像提供:古野
古野のシステムは、ブイ、ボート、船舶などの AIS ターゲットにグラフィカルな仮想形状を重ねて、視界不良の状況でもそれらの位置の詳細を表示できます。画像提供:古野
テクノロジー企業Orca AIは、急な操縦や航路逸脱を避けるためにデジタルサポートを利用することによるメリットを算出した。顧客企業の1社であるSeaspan Corpは、Orca AIの航行アシスタントを使用することで、接近遭遇が19%減少し、他の船舶との最小平均距離が20%増加したことを記録し、1隻あたり年間10万ドルの燃料節約につながると推定している。
シピン・システムズのCEO、オシャー・ペリー氏は、同社のAIベースのカメラシステムを船内の主要運用エリアに設置したところ、事故が42%減少し、ブリッジの人員配置の順守率が17%上昇するなどの運用成果が得られたと主張している。このシステムは、ナビゲーション、気象、機械センサーなどの船舶システムとビデオデータを統合することで、火災、無人ブリッジ、不適切なPPEの使用などの早期検出を含むリアルタイムのリスク検出を提供する。一部の船舶では、導入後180日以内に事故がゼロになったと報告されているほか、メンテナンスの改善と異常の早期検出により、予定外のオフハイヤー日数が30%減少した。
古野電気は、ブイ、ボート、船舶などの AIS ターゲットにグラフィカルな仮想形状を重ねて、視界不良の状況でそれらの位置の詳細を提供できるシステムを AI で強化しています。同社は現在、自動またはアシストドッキングシステムを開発中です。
さらに、 Furuno USA Inc. の国内営業マネージャーであるマット・ウッド氏は、同社は日本国内で半有人および自律航海に何度か参加したと語る。「近い将来に最も起こりそうなシナリオの 1 つは、船上の人間の乗組員が、機械学習と陸上施設からの船舶状況の視覚化の両方によって強化されることです。」
彼は続けます。「現在、AR 開発は多くのツールが開発されている段階にあり、その多くは優れたものです。しかし、これらの表示には標準化がありません。船員をこの方程式から排除することはできませんし、排除すべきでもありません。しかし、できるだけわかりやすい方法で、できるだけ最適な情報を船員に提示する方法が必要です。」
古野電気は、オスロ建築デザイン大学が主導する OpenBridge プロジェクトに、Kongsberg、Brunvoll、Vard などのさまざまな企業と提携して参加しています。これらの企業は、最新のユーザー インターフェイス テクノロジーと人間中心設計の原則に基づいて、橋梁の設計を改善するための一連のツールとアプローチを開発しました。その目的は、橋梁にさまざまなユーザー インターフェイスが存在することで生じる断片化を回避することです。断片化によってトレーニングの必要性が高まり、人的エラーの可能性も高まります。
 これまでの OpenAR プロジェクトの技術デモンストレーションのほとんどは、現実世界の船舶やその他の情報を表示するポイントオブインタレスト表示システムを通じた状況認識のサポートに重点を置いています。
これまでの OpenAR プロジェクトの技術デモンストレーションのほとんどは、現実世界の船舶やその他の情報を表示するポイントオブインタレスト表示システムを通じた状況認識のサポートに重点を置いています。
-- オスロ建築デザイン学校、Kjetil Nordby 教授
画像提供:Kjetil Nordby  ヘッドマウント AR インターフェイスを使用してブリッジ ウィングに AR オーバーレイをレンダリングしたもの。レンダリングは Jon Fauske によるもので、著作権は Oslo School of Architecture and design が所有しています。画像提供: Kjetil Nordby 現在、1,000 社を超える企業がガイドラインへのアクセスを登録しており、 OpenBridgeの成功は、ガイドラインを AR 機能に拡張するOpenARプロジェクトにつながっています。これまでのプロジェクトの技術デモのほとんどは、現実世界に船舶やその他の情報を表示するポイント オブ インタレスト表示システムによる状況認識サポートに焦点を当てていると、オスロ建築デザイン大学の Kjetil Nordby 教授は述べています。「これらは現在、遠隔操作センターのビデオ、ウィンドウ投影インターフェイス、船上スクリーンベースの状況認識システム、自動車システムに似たヘッドアップ ディスプレイ用に作られています。まだパートナーがヘッドマウント システムを作っているのを見たことはありませんが、それも近い将来に実現すると期待しています。」
ヘッドマウント AR インターフェイスを使用してブリッジ ウィングに AR オーバーレイをレンダリングしたもの。レンダリングは Jon Fauske によるもので、著作権は Oslo School of Architecture and design が所有しています。画像提供: Kjetil Nordby 現在、1,000 社を超える企業がガイドラインへのアクセスを登録しており、 OpenBridgeの成功は、ガイドラインを AR 機能に拡張するOpenARプロジェクトにつながっています。これまでのプロジェクトの技術デモのほとんどは、現実世界に船舶やその他の情報を表示するポイント オブ インタレスト表示システムによる状況認識サポートに焦点を当てていると、オスロ建築デザイン大学の Kjetil Nordby 教授は述べています。「これらは現在、遠隔操作センターのビデオ、ウィンドウ投影インターフェイス、船上スクリーンベースの状況認識システム、自動車システムに似たヘッドアップ ディスプレイ用に作られています。まだパートナーがヘッドマウント システムを作っているのを見たことはありませんが、それも近い将来に実現すると期待しています。」
職場デザインに対する彼の関心はエンジンルームにまで広がり、最近では OpenZero プロジェクトで、エネルギー効率を高めて燃料消費を削減する脱炭素化技術に取り組んでいます。このプロジェクトのパートナーには、ABB、GE Marine、DNV などがあります。
これらのプロジェクトはすべて、乗組員による意思決定をサポートするように設計されていますが、開発中のシステムは、自律船の安全な航行と管理の基盤でもあります。そのためには、機械による意思決定を強化する必要があります。
「歩行者や他の車両や船舶の予測は、陸上、空中、海上システムにおける自律航行において最も資金が投入されている研究分野の1つです」とノルウェー北極大学のロクカルゲ・プラサド・ペレラ教授は述べています。ペレラ教授は、訓練シミュレーターで生成されたものや船上のセンサーやAISデータなどの広範なデータベースから学習できるニューラルネットワークを使用して、遠距離および近距離での船舶の挙動を予測するモデルをテストしています。その目的は、自律船での安全な意思決定を可能にし、乗組員が自律船に遭遇した場合にその挙動を理解できるようにすることです。
ペレラ氏のチームは、ニューラル ネットワーク学習と AIS データを組み合わせて、最大 20 分間の船舶の軌道を予測する大規模な予測装置の開発に取り組んでいます。また、船舶の運動モデルと、船上パフォーマンス データからのニューラル ネットワーク学習を組み合わせて、船舶の軌道の直後 20 秒間を正確に予測するローカル予測装置も開発されています。
「ローカル予測は、船舶が接近して遭遇する多くの状況で衝突の危険性を評価するために重要です。したがって、ローカルおよびグローバル スケールの両方の予測は、自律船舶が衝突の可能性のある状況を検知し、早い段階で適切な行動をとるのに役立ちます」とペレラ氏は言います。「システムが決定を下すとき、これらの早期予測は極めて重要です。」
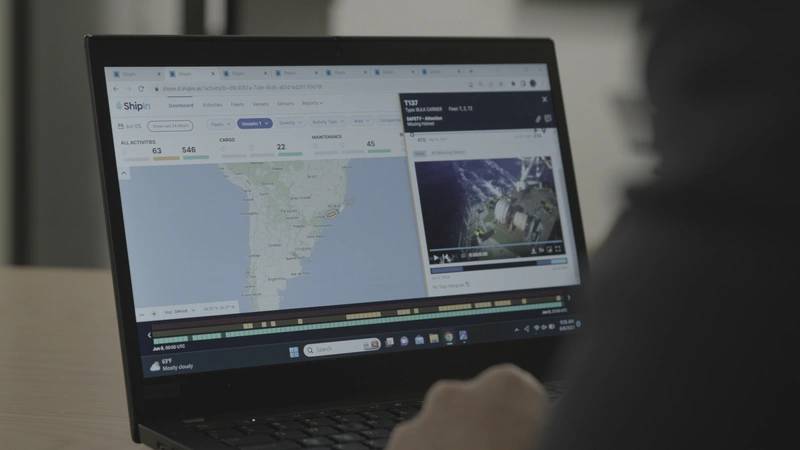 Shipin Systems は、火災の早期検出、無人ブリッジ、不適切な PPE の使用など、リアルタイムのリスク検出機能を提供します。画像著作権 2024、ShipIn Systems Inc. 提供。
Shipin Systems は、火災の早期検出、無人ブリッジ、不適切な PPE の使用など、リアルタイムのリスク検出機能を提供します。画像著作権 2024、ShipIn Systems Inc. 提供。

-wetzkaz-Adobestock-155440 "(c) wetzkaz Adobestock")

-Stock87-アドビストック-155406 "(c) Stock87 アドビストック")
-Petrus-Adobestock-155336 "ドイツのモーゼル川 (c) Petrus / Adobestock")






