KIMMが水中放射騒音予測のコードを解読
-161664 "KIMMの主任研究員、イ・ソンヒョン氏。画像提供:韓国機械研究院(KIMM)")
KIMMの主任研究員、イ・ソンヒョン氏。画像提供:韓国機械研究院(KIMM)
")
「この世界クラスのシステムは、戦略的に機密性の高い水中騒音データのリアルタイム予測と監視を可能にします」と、KIMMの主任研究員であるイ・ソンヒョン氏は述べています。「このシステムは海軍のステルス能力を強化するだけでなく、多様な海軍作戦における早期故障検知とメンテナンス効率の向上にも貢献します」と、KIMMの主任研究員であるイ・ソンヒョン氏は述べています。画像提供:韓国機械研究院(KIMM)
韓国機械研究院(KIMM)の研究者らが、海軍のステルス作戦の重要な要素である水中放射騒音(URN)を予測するための船体取り付け型センサーベースシステムを開発したと報じられている。
KIMM、水中放射騒音を予測する初の船体取り付け型センサーシステムを開発
新しいアルゴリズムが水中の騒音をリアルタイムで予測
- 海軍のステルス性と運用効率を向上
この新技術により、海軍艦艇が発する水中騒音レベルをリアルタイムで監視できるようになり、異常な振動を早期に検知して運用効率を向上させ、メンテナンスコストを削減することが可能になります。
国立科学技術研究会議傘下の韓国機械材料研究院仮想工学研究センターの主任研究員、イ・ソンヒョン氏が率いる研究チームは、複数の海軍艦艇を用いた実規模試験を通じて、このシステムの検証に成功しました。研究チームは、船舶の運航中に収集された経験的データを用いて、船体振動と水中騒音の両方を正確に監視・予測する独自のアルゴリズムとセンサー配置技術を開発しました。
- 「この世界クラスのシステムは、戦略的に機密性の高い水中騒音データのリアルタイム予測と監視を可能にします」と、 KIMMの主任研究員であるイ・ソンヒョン氏は述べています。「海軍のステルス能力を強化するだけでなく、多様な海軍作戦における早期の故障検知とメンテナンス効率も向上させます。」
従来のURN分析手法では、周囲の船舶の往来がない静かな海域で外部機器を用いて断続的にデータを収集する必要がありましたが、この新システムは、リアルタイム更新による船上継続的なモニタリングを可能にします。限られたセンサー数でも、最適化されたセンサー配置と高度な信号処理技術により、高い予測精度を維持し、実海域試験において4デシベル以内の誤差を実現しました。
このアルゴリズムは、船体に取り付けられた加速度計からのリアルタイムデータを処理し、振動特性、放射効率、周波数プロファイルを分析して、水中放射騒音レベルを計算します。さらに、統計的異常検出アルゴリズムにより、異常な振動パターンを早期に特定できるほか、適応可能な閾値設定により、様々な運航条件に対応します。
このリアルタイム機能は、ステルス操作、特にキャビテーションや推進モードの変化による変化の検出に有利です。
このシステムは軍事用途に加え、多様な船舶設計や運用に柔軟に統合できるため、保守管理にも大きなメリットをもたらします。センサー構成は設置・運用コストの削減に貢献すると同時に、艦隊全体の管理体制も向上させます。
研究チームは、船体搭載センサーから速度変化を含む様々な運航条件下での振動データを収集することで、この技術をさらに検証しました。テストは水中騒音測定に関する国際規格(ISO 17208-1:2016)に準拠して実施され、実環境での予測誤差は一貫して4dB以内であることが示されました。
このプロジェクトは防衛請負業者LIG Nex1と共同で実施され、 「海軍推進システム向け船体取り付けセンサーベース監視技術」と題するプロジェクトの下、国防調達計画局および国防迅速調達技術研究所の支援を受けて実施されました。
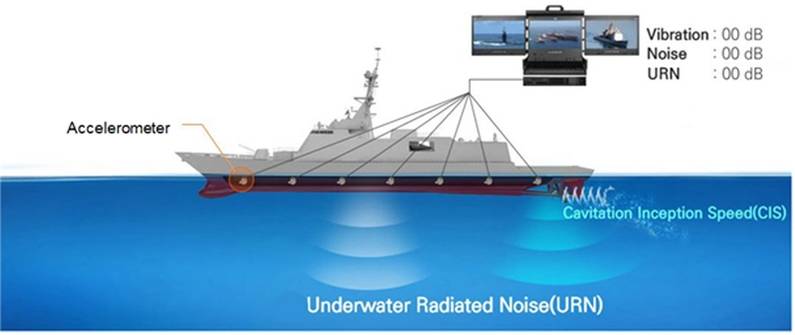 水中騒音予測アルゴリズムの概略図。
水中騒音予測アルゴリズムの概略図。
画像提供:韓国機械材料研究院(KIMM)





-161467 "(クレジット:ズヴェズダ造船所)")



と、ECOのエグゼクティブ・バイスプレジデント、ディノ・シュエスト氏。画像提供:HD Korea Shipbuilding & ECO")

